move_base 模块
Published: 2020-03-15
整体模块 #
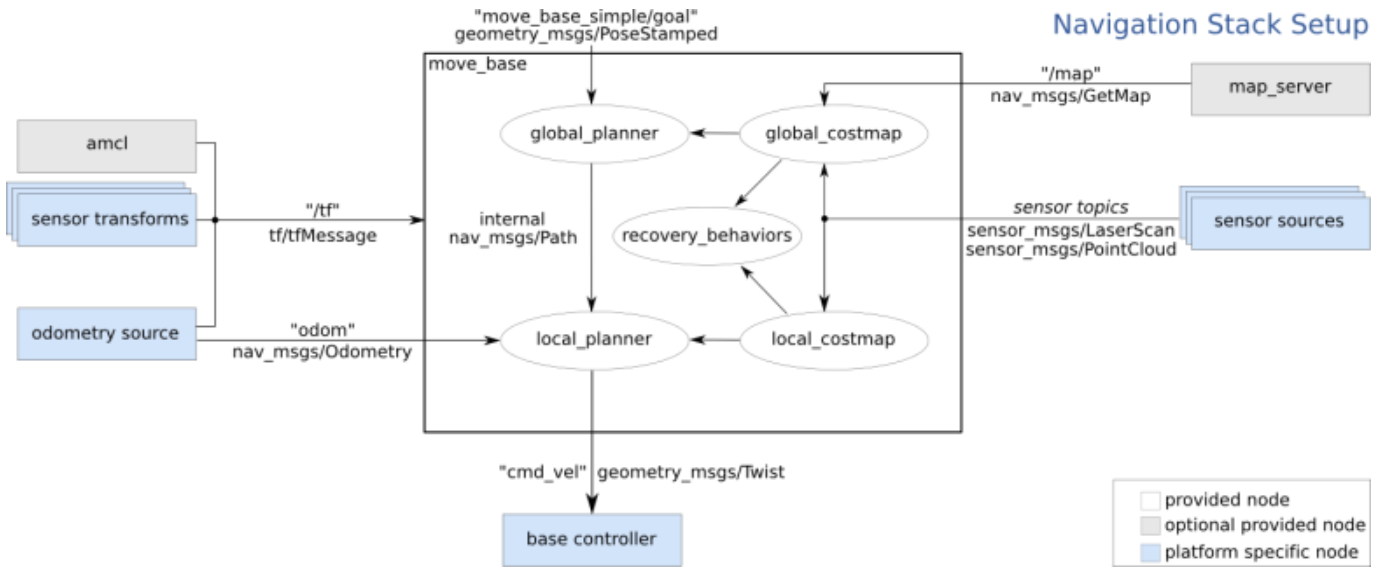
- odometry source: 里程计用来提供高频率的概略初始位姿;
- sensor sources: 机器人或无人车中,包含大量可用于定位的传感器:相机、激光、毫米波雷达等;
- map_server: 用激光SLAM手段,如 LOAM、GMapping 建立高精度地图;
- amcl: 结合传感器与高精度地图,实现 蒙特卡洛定位。
规划和控制 #
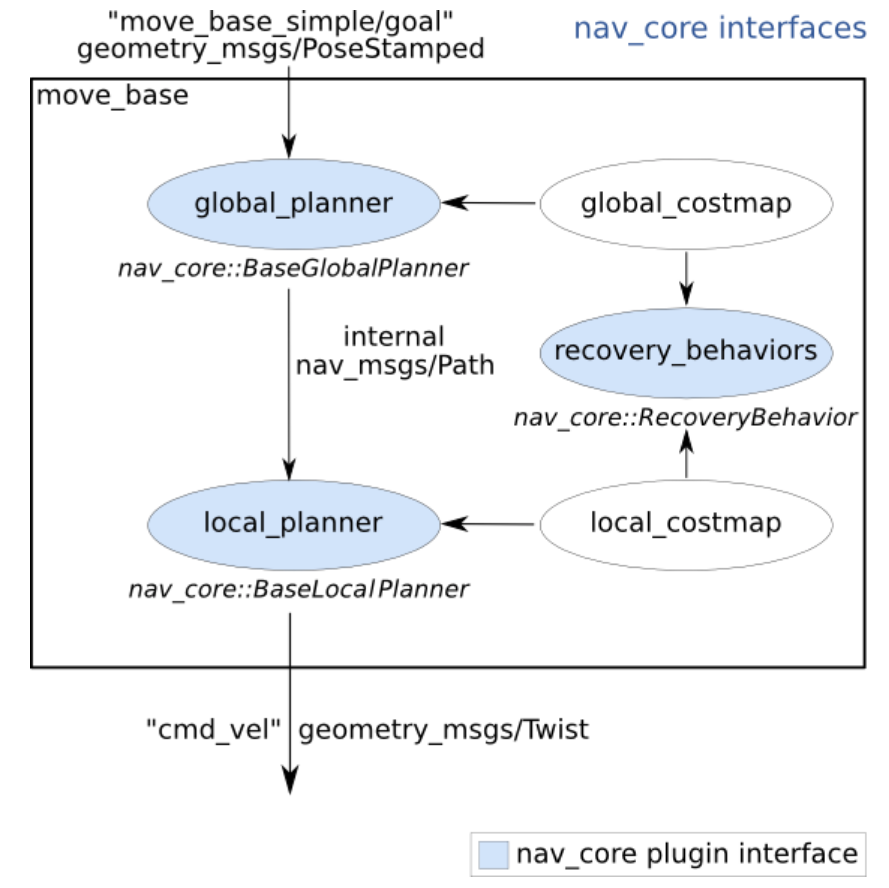
Global Planner
- global_planner: 可用来取代过时的navfn。 使用A*或Dijkstra算法进行全局路径规划。
- carrot_planner: 简单的测试算法。
Local Planner
- base_local_planner: 实现Dynamic Window Approach(DWA) and Trajectory Rollout两种算法。其中DWA算法被dwa_local_planner取代。
- eband_local_planner: Implements the Elastic Band method on the SE2 manifold
- teb_local_planner: Implements the Timed-Elastic-Band method for online trajectory optimization
- mpc_local_planner: Provides several model predictive control approaches embedded in the SE2 manifold
Recovery Behavior
- clear_costmap_recovery: A recovery behavior that reverts the costmaps used by move_base to the static map outside of a user-specified range
- rotate_recovery: A recovery behavior that perfroms a 360 degree rotation of the robot to attempt to clear out space.
其他 #
Cost Map
Robot Pose EKF
Next: IMU标定与解算
Previous: Kd Tree