车载移动测量系统
Published: 2020-04-03
Table of contents
武汉大学测绘学院陈长军老师的博士论文:车载移动测量系统集成关键技术研究, 详细介绍了高精度地图采集车中的多项关键技术,具有很高的参考意义。
高精度地图需要转换到WGS-84世界系中,需要建立世界系下的控制点,参考大比例尺地形图测绘。
组合定位定姿 #
GPS/IMU的解算方法,可参考GPS/INS组合导航。
立体相机High-Resolution Stereo Camera (HRSC) #
相对标定:在室内高精度控制场,范围633m,点位精度0.2mm,标定主点、等效焦距、畸变系数,得到单个相机的位置和姿态
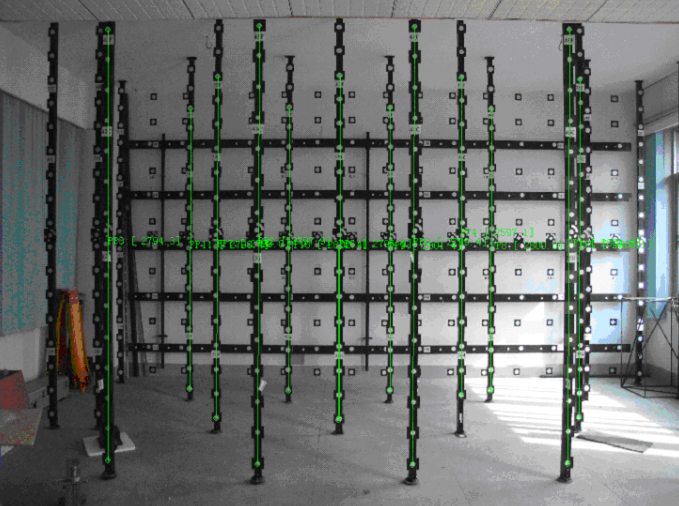
绝对标定:室外控制场,确定立体相机与惯导之间的相对关系

激光扫描仪3D LiDAR Scanner #
三维标定场:寻找同名点,转到惯导坐标系下

2D LiDAR Scanner #
道路面数据:自定义坐标系
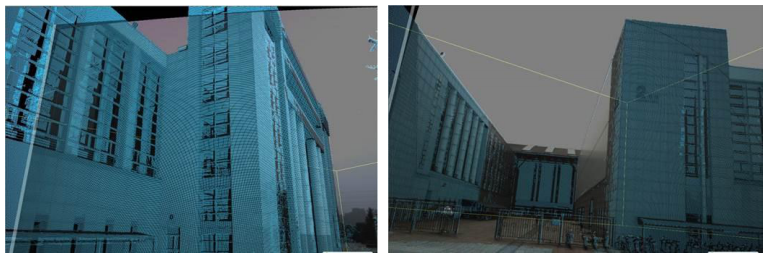
全景影像与激光点云Panoramic Image & Laser Point Clouds #
内标定:平面棋盘格标定法,参考针孔相机畸变校正。
高精度配准:系统静止,LiDAR采用3D扫描模式??进行
Next: 富爸爸穷爸爸
Previous: Deep Learning