ORB-SLAM2
Published: 2020-01-04 | Lastmod: 2020-01-29
Tracking #
Initialization
SearchForInitialization --> Initialize(RANSAC) --> GlobalBundleAdjustemnt --> ComputeSceneMedianDepth
SearchForInitialization:
GetFeaturesInArea --> DescriptorDistance --> ComputeThreeMaxima
ORB特征
Oriented FAST关键点:
- 比较像素点周围圆上的像素间亮度的差异
- 非极大值抑制,在一定区域内仅保留响应极大值的角点,避免太集中
- 对角点计算Harris响应值,仅保留前N个具有最大响应值的角点
- 构建金字塔,在金字塔每一层检测角点。实现尺度不变
- 灰度质心法,连接图像块的几何中心与质心。实现旋转不变
BRIEF描述子:
- 随机选点并比较灰度,组成128维的二进制数组
- 使用Hamming distance作为度量,即不同位数的个数
F矩阵
https://zhuanlan.zhihu.com/p/61614421
在求解F和H矩阵之前,应该首先进行特征点归一化,保证坐标均值为0,一阶绝对矩为1。(MVG P67,归一化才能消除坐标变换的影响)
设\(p1\),\(p2\)为像素坐标,可知:
\[ p_2 = K (RP + t) \\[2mm] p_1 = KP \]
从上述\(p1\),\(p2\)的关系式出发,导出:
\[ (K^{-1} p_2)^T t^{\wedge} K^{-1} p_2 = 0 = p_2^T K^{-T} t^{\wedge} R K^{-1} p_1 = p_2^T F p_1 \]
一对匹配的像素点可以写1个方程,考虑到尺度等价性,使用八点法即可求解\(F\)矩阵。
TODO: 由基础矩阵F分解出R和t
多余的话
opencv中,cv::findFundamentalMat()如果选择8点法,则是直接将所有点进行最小二乘计算,没有外点剔除功能。
https://stackoverflow.com/questions/25251676/opencv-findfundamentalmat-very-unstable-and-sensitive/48394798
H矩阵
平面方程为:
\[ aX + bY + cZ + d = 0 \\[2mm] -\frac{n^TP}{d} = -1 \]
依旧从\(p1\),\(p2\)的关系式出发,导出:
\[ p_2 = K (RP + t \cdot (-\frac{n^TP}{d})) = K (R - \frac{tn^T}{d}) K^{-1} p_1 = Hp_1 \]
一对匹配的像素点可以写2个方程,因此4对匹配特征点即可求解\(H\)矩阵。
TODO: 由单应矩阵H恢复出R和t
F与H的评分
\[ S_M = \sum_i\{ \rho_M\left(d_{cr}^2\left(x_c^i,x_r^i,M\right)\right)+ \rho_M\left(d_{rc}^2\left(x_c^i,x_r^i,M\right)\right) \} \\[2mm] \rho_M\left(d^2\right)=\begin{cases} \Gamma - d^2, &\text{if } d^2 < T_M \\ 0, &\text{if } d^2 > T_M\end{cases} \]
其中,\(M\)为\(H\)或者\(F\)。\(T_M\)为距离阈值,根据95%的\(\chi^2\)测试设置。 \(T_H=5.99\)(两个自由度),\(T_F=3.84\)(1个自由度)。这里假设标准差为1个像素。
\(\Gamma\) is defined equal to \(T_H\) so that both models score equally for the same d in their inlier region, again to make the process homogeneous.
\[ R_H=\frac{S_H}{S_H+S_F} \]
select the homography if \(R_H>0.45\), which adequately captures the planar and low parallax cases. Otherwise, we select the fundamental matrix.
三角化
https://blog.csdn.net/weixin_43795395/article/details/93769148
https://www.cnblogs.com/yepeichu/p/10792899.html
已知匹配的像素点,及两帧图像的变换关系,则:
\[ x = PX \\[2mm] x' = P'X \]
根据\(x^\wedge PX = 0\)性质,可得到如下方程:
\[ AX = \begin{bmatrix} xp^{3T}-p^{1T} \\ yp^{3T}-p^{2T} \\ x'p'^{3T}-p'^{1T} \\ y'p'^{3T}-p'^{2T} \end{bmatrix} X = 0 \]
对矩阵\(A\)进行SVD分解,可知:
\[ J(y) = \min \|Ax\| = \min \|UDV^Tx\| = \min \|DV^Tx\| \]
由于对角阵\(D\)是矩阵\(A\)的奇异值从大到小降序排列而成,因此\(J(y)\) 的最小值在\(D\)矩阵奇异值最小的地方取到。可知:
\[ V^Tx = y = [0, 0, 0, 1]^T \\[2mm] x = Vy \]
于是,\(x\)的解就变成了正交矩阵\(V\)的最后一列的列向量。
多余的话——解方程
http://eigen.tuxfamily.org/dox/group__LeastSquares.html
对于方程:
\[ Mx = b \]
可以使用最小二乘解\(x = (M^T M)^{-1} M^T b\),或者利用QR分解\(x = R^{-1} Q^T b\)。
将b移到左边,并设最后一个参数为1,可转换成如下方程:
\[ Mx = 0 \]
可以通过SVD分解,解对应于\(M\)最小特征值对应的特征向量。关于\(M\)与\(M^T M\)的SVD分解的关系, 可以参考matrix。
Tracking
TrackWithMotionModel
SearchByProjection --> PoseOptimization
SearchByProjection:
GetFeaturesInArea --> DescriptorDistance
TrackWithReferenceKeyFrame
SearchByBow --> PoseOptimization
SearchByBow:
FeatureVector --> DescriptorDistance --> ComputeThreeMaxima
Relocalization
SearchByBow --> EPnP(RANSAC) --> PoseOptimization --> SearchByProjection --> PoseOptimization
EPnP:
https://zhuanlan.zhihu.com/p/59070440
- 3D点的齐次坐标被表示为4个控制点齐次坐标的线性组合,然后将其作为已知量拿到相机坐标系下使用。
- 结合上一步,将相机坐标系下的空间点坐标,转换成4个控制点在摄像机坐标系下的坐标的线性组合,并结合对应的像素点坐标,建立方程,从而解算出控制点在摄像机坐标系下的坐标。
- 最后根据4个控制点,将所有的3D点在摄像机坐标系下的坐标恢复出来。接着采用ICP方法,求解出R和t。
ICP:
- 计算两组点的质心位置,然后计算每个点的去质心坐标
\[ q_i = p_i - p \\[2mm] q_i' = p_i' - p' \]
- 求取R
\[ W = \sum_{i=1}^n q_i q_i'^T = U \Sigma V^T \\[2mm] R = UV^T \]
- 求取t
\[ t = p - R p' \]
题外话———未知对应关系的ICP:
- 根据距离最小寻找对应点
- 根据对应点,计算R和t
- 对点云进行转换,计算误差
- 重新寻找对应点,不断迭代,直至误差小于某一个值
属于EM算法的一种,待求变量为\( [R | t] \),隐变量为点的对应关系。先固定第一个变量,优化另一个;再固定另一个,优化第一个变量。通过多次优化后,两个变量都达到最优值。
UpdateLocalMap
SearchByProjection --> PoseOptimization
LocalMapping #
ComputeBow --> SearchForTriangulation --> LocalBA
SearchForTriangulation:
FeatureVector --> DescriptorDistance --> CheckDistEpipolarLine --> ComputeThreeMaxima
关于优化中的卡方分布外点剔除
https://zhuanlan.zhihu.com/p/58556978
高斯白噪声的平方服从卡方分布,有几个观测量就代表几个自由度。
LoopClosing #
TF-IDF
TF: Term Frequency, 指某个特征在单幅图像中出现的频率。
\[ TF_i = \frac{n_i}{n} \]
IDF: Inverse Document Frequency, 指单词在字典中出现的频率越高,则分类图像时区分度越高。
\[ IDF_i = \log \frac{n}{n_i} \]
ComputeSim3
SearchByBow --> sim3(RANSAC) --> SearchBySim3 --> OptimizeSim3 --> SearchByProjection
当两个姿态比较接近时,sim3求解不出有效值。这也是闭环成功后,后续很长一段时间里,不再进行闭环的原因。
sim3:
LoopClosing
OptimizeEssentialGraph --> RunGlobalBundleAdjustment
Optimization #
点与位姿优化
\[ \xi^* = \arg \min_\xi \frac{1}{2} \sum_{i=1}^n {\| u_i - \frac{1}{s} K \exp(\xi^\wedge) P_i \|}_2^2 \\[2mm] P' = TP = RP + t \\[2mm] \begin{bmatrix} u \\ v \end{bmatrix} = \begin{bmatrix}f_x &0 &c_x \\ 0 &f_y &c_y\end{bmatrix} \begin{bmatrix}\frac{X'}{Z'} \\ \frac{Y'}{Z'}\end{bmatrix} \]
回环(采用左扰动)
实际ORB-SLAM的Pose Graph是采用的Sim3变换。此处仅推导SE(3)上的公式。
\[ \begin{aligned} e_{ij} &= \ln (T_{ij}^{-1} T_i^{-1} T_j)^\vee \\[2mm] &= \ln (T_{ij}^{-1} T_i^{-1} \exp((-\xi_i)^\wedge) T_j)^\vee \\[2mm] &= \ln (T_{ij}^{-1} T_i^{-1} T_j \exp((-Ad(T_j^{-1})\delta\xi_i)^\wedge))^\vee \\[2mm] &= \ln (\exp(e_{ij}^\wedge) \exp((-Ad(T_j^{-1})\delta\xi_i)^\wedge))^\vee \\[2mm] &= \mathcal{J}_r^{-1}(e_{ij}) (-Ad(T_j^{-1})\delta\xi_i) + e_{ij} \\[2mm] \frac{ \partial{e_{ij}} }{ \partial{\delta\xi_i} } &= -\mathcal{J}_r^{-1}(e_{ij}) Ad(T_j^{-1}) \end{aligned} \]
同理可得:
\[ \frac{ \partial{e_{ij}} }{ \partial{\delta\xi_j} } = \mathcal{J}_r^{-1}(e_{ij}) Ad(T_j^{-1}) \]
有以下近似关系:
\[ \mathcal{J}_r^{-1}(e_{ij}) \approx I + \frac{1}{2} \begin{bmatrix} \phi_e^\wedge &\rho_e^\wedge \\ 0 &\phi_e^\wedge \end{bmatrix} \]
BowVector & FeatureVector #
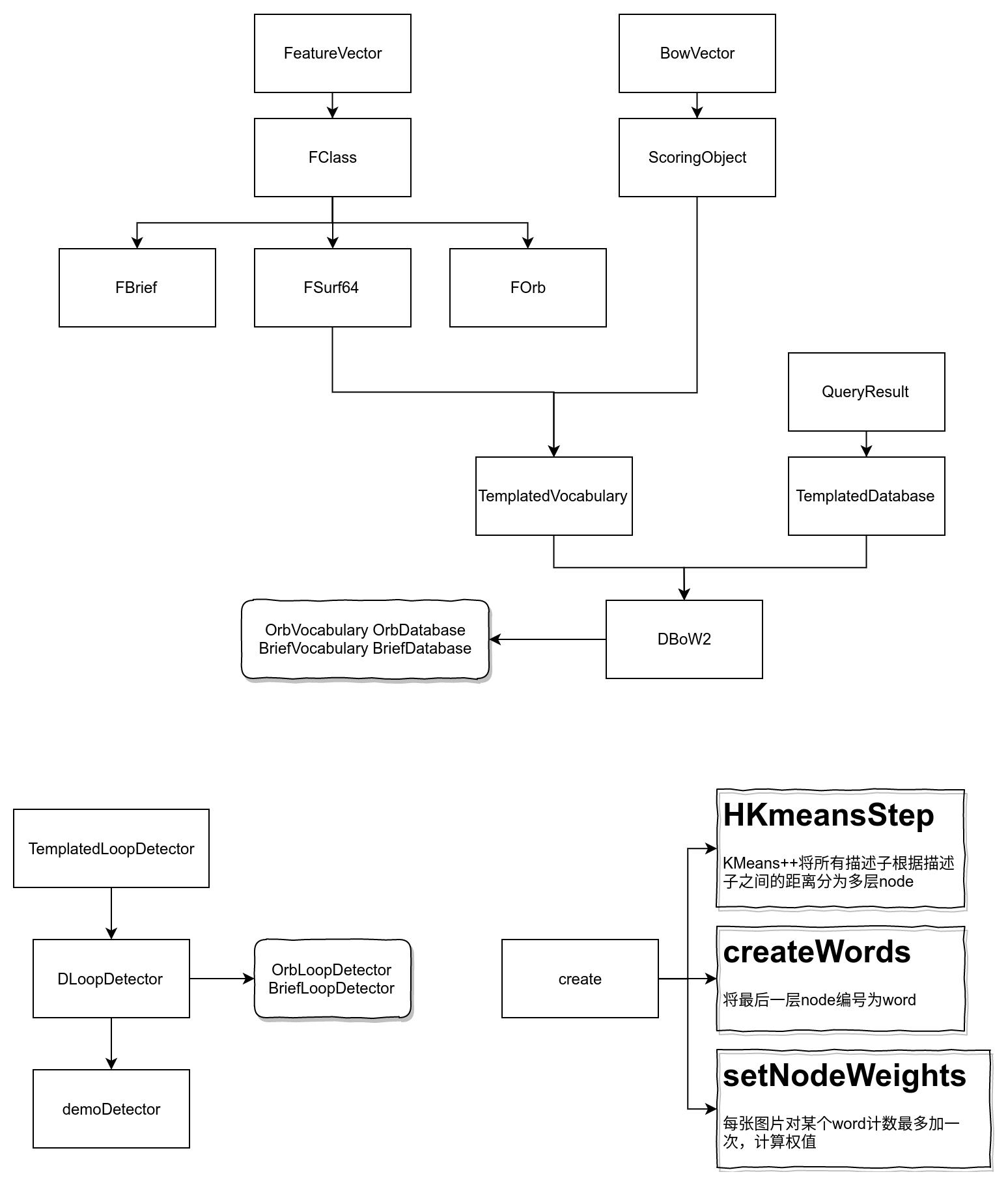
BowVector存储着叶子节点,信息最细微,仅用在DetectRelocalizationCandidates()函数中,用来选取备选帧。
FeatureVector存储着倒数第4层的节点,信息比较粗糙,用在各种SearchBy*函数中,用来加速特征点的匹配。
FeatureVector --> FClass 计算特征向量之间的距离,用于加速特征点匹配
BowVector --> ScoringObject 计算单词之间的分数,用于匹配回环关键帧
HKmeasStep --> createWords --> setNodeWeights
先使用Kmeans++分为分层node;再将最后一层编码为word;最后每张图片对某个word计数最多加一次,计算权值
g2o #
采用se3表达参数;
首先进行块分解,BlockSolver默认使用舒尔补消除变量;
之后进行线性求解。其中LinearSolverDense直接进行Cholesky分解,LinearSolverEigen需要调用Eigen的稀疏Cholesky分解,且默认不reordering。因为在Schur之后,矩阵比较稠密,reordering影响不大;
Veterx: oplusImpl
Edge: ComputeError & linearizeOplus
https://zhuanlan.zhihu.com/p/100522179
Next: VINS-MONO
Previous: MSCKF